產品體系
PRODUCT SYSTEM
-
大 學 體 系
-
中高職體系
-
中小學體系
-
幼 教 體 系
機器人工程專業建設
- 分類:大 學 體 系
- 發布時間:2020-12-30 08:45:13
- 訪問量:0
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
機器人創新設計實驗室/C語言程序設計

課程名稱/簡介:
(一)機器人創意設計和競賽(C 語言編程實踐,必修)
在C 語言學習的基礎上,通過圖形化的C 語言編程環境對傳感器,執行器進行編程,初步掌握數字 I/O 的使用方法和特點,從而為微機原理、計算機接口等課程的理論學習打下基礎。初步讓學生接觸項目式學習方法,搭建自己的創意機器人或者完成格斗競賽機器人。課程 20-32 課時(二)機器人工作室創新實訓(選修,競賽集訓)
本課程體系采用項目式教學。面向工程項目、面向真實應用,注重實踐能力,團隊能力的培養,將培養優委設計師,工程師的思想貴穿整個課程體系和教學過程。課程設置上體現了電子、信息、計算機、系統軟硬件設計、嵌入式系統等方面的融匯貫通。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
機電一體化設計實驗室/機電一體化系統設計及實驗

實驗室名稱/支撐課程:
(一)機電一體化產品設計實驗(必修,可安排小學期)
課程融合了機電一體化理念和先進的傳感器網絡技術。可以通過構思-搭建-編程,快速實現生產、生活機電一體化工程的原型樣機,系統地培養大學生的創新設計能力、綜合工程素養與團隊協作精神,特別適合有關專業開展課程綜合設計。課程 32-48 學時。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
工業機器人實驗室/工業機器人拆裝調試實驗(實物平臺+虛擬仿真)工業機器人工作站設計與編程

課程名稱/簡介:
(一)工業機器人拆裝調試實驗
課程采用HBO3-545-C10六軸工業機器人(3kg)設置了機械裝置裝配、電氣裝置裝配、整機裝配、整機調試、校準、標定、維護與保養、維修、培訓與管理等環節,可完成工業機器人裝調與維修實訓任務,能夠滿足工業機器人裝調維修的理論考核和實訓考核任務,符合技能鑒定考核標準,配合虛擬仿真環節進行預習、復習,使學生更深入了解工業現場常用的機器人本體內部機械結構、機械連接、電機安裝、減速器裝配、同步帶傳動等。
(二)工業機器人工作站設計與編程
課程采用ABB 工業機器人,開展工業機器人參數設定、常用外圍設備聯結和控制,按照實際需求編寫工業機器人單元應用程序,按照實際工作站搭建對應的仿真環境,對典型工業機器人單元進行離線編程。掌握機器人系統操作編程、自動化系統設計、工業機器人單元離線編程及仿真、工業機器人單元運維、工業機器人測試等技能。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
人機交互技術實驗室/智能機器人交互技術

課程名稱/簡介:
(一)智能機器人交互技術(必修,或者部分作為機器人學基礎實驗必修)
家庭場景服務機器人交互技術是一門面向家庭應用場景,開展服務機器人操作交互,視覺交互,語音交互控制的課程,依托尚和服務機器人平臺。課程深入實踐了基于單目/雙目相機、麥克風陣列、激光雷達等感知方式的人機交互技術。課程一共 44 學時。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
計算機視覺實驗室/Python機器視覺實驗

課程名稱/簡介:
(一)Python 機器視覺實驗(必修)
Python機器視覺實驗課幫助學生通過Python編程來控制半仿人機器人做出各種動作,并完成視覺以及人機交互任務,智元素機器人內部搭載了一枚最新的樹莓派4處理器,可執行各種 Python程序,基于OpenCV搭建視覺-運動閉環機器人應用。課程 36 學時。
(二)仿人機器人體感協同實驗(選修,競賽集訓)
仿人機器人體感協同實驗是一門依托智元素平臺的機器人體感對抗實驗課,學生可了解一臺仿人機器人的動作編輯原理以及體感交互過程。通過讀取穿戴式 IMU 的姿態數據,可直接將動作投送到機器人關節,或者通過動作識別,激發事先編輯的格斗動作序列。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
機器人操作系統實驗室/ROS 機器人實驗

課程名稱/簡介:
(一)ROS 機器人操作系統實驗
ROS 機器人操作系統課程是一門帶領學生從零基礎到深入探索 ROS 的一門課程,可以幫助學生熟練掌握 ROS 常用操作,調試方法,以及依托 ROS 實現激光 SLAM,機器視覺,語音交互等。智行 Mini 是一款輕量級 ROS 教學平臺,方便獨立教學使用,搭載高精度機器人底盤,嵌入式處理器,高清攝像頭,360 度激光雷達,語音陣列等,是上手 ROS的好伙伴。課程 28 課時。
實驗類型:
專業核心課程實驗
實驗室名稱/支撐課程:
虛擬仿真實驗室/智能機器人仿真實驗

課程名稱/簡介:
(一)智能機器人仿真平臺實驗
虛擬仿真技術面向四旋翼無人飛行器,自動駕駛汽車,ROS 機器人操作系統平臺等模型及動力學建模,用于研究機器人控制算法、傳感器數據建模、基于模型的各種人工智能算法研究、基于各種實際場景的建模,如城市、倉庫、山地等。課程 40 學時。
(二)無人機仿真平臺實驗
無人機仿真平臺實驗是高級的仿真系統實驗課程,可在仿真平臺上模擬飛行,熟悉地面站操作,更可在試飛之前,驗證代碼邏輯,減小炸機損失。進一步可學習關于多機協同,集群的概念與算法。課程依托半物理仿真平臺,這是一個基于虛幻 4 游戲引擎的仿真平臺,可以模擬生成多種傳感器,是飛行視覺仿真的絕佳平臺。課程 20 學時。
實驗類型:
機器人系統綜合實踐
實驗室名稱/支撐課程:
自動駕駛技術實驗室/機器人系統綜合實踐
 |
 |
課程名稱/簡介:
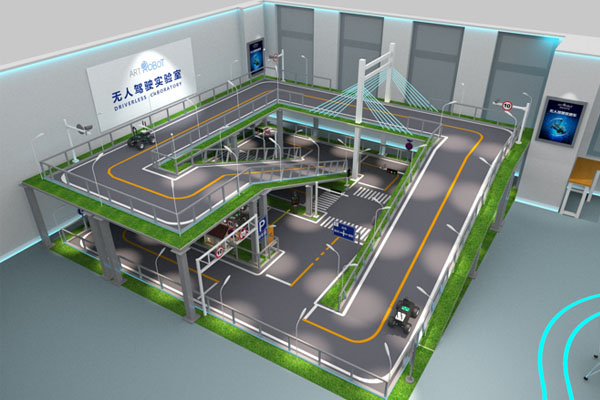
(一)自動駕駛技術綜合實踐
自動駕駛技術實驗是一門讓學生深入了解自動駕駛軟硬件技術體系的課程,本課程依托半實物仿真系統以及智能車平臺,半實物仿真平臺用于生成真實場景,無人車平臺則搭載各種傳感器,用于自動駕駛技術實踐以及相關競賽學習。最終的大作業為兩個自動駕駛仿真實驗和一個智能車模擬賽道實驗。課程共 50 課時。
實驗類型:
機器人系統綜合實踐
實驗室名稱/支撐課程:
智能無人機實驗室/嵌入式系統實驗/機器視覺實驗/機器人系統綜合實踐
 |
 |
 |
課程名稱/簡介:
(一)無人機嵌入式系統實驗(必修)
無人機嵌入式系統實驗是一門針對無人機飛行控制器功能研發的實驗課程,目的是讓學生可以在了解四旋翼基本組成與工作原理的情況下,完成飛行控制器的軟硬件功能開發。課程將開展傳感器濾波、姿態高度PID控制器設計等無人機編程經典內容。課程 32 學時。
(二)無人機視覺實驗(選修)
無人機視覺實驗是一門無人機與機器視覺相結合的課程,學生通過編程實踐讓無人機依靠視覺信息進行自主的飛行,本課程依托平臺是 Aviator-mini 智能無人機視覺版,智能無人機視覺版搭載了可編程處理器,高性能攝像頭,學生可依靠 python 編程實現類似一鍵起飛、巡線飛行這樣的高級功能。課程 20 學時。
(三)無人機自主定位與環境感知實驗(選修)
無人機自主定位與環境感知實驗是無人機的最高級應用,是解決無人機不依賴 GPS 完成自主定位-避障-視覺制導功能的課程,是人工智能與 SLAM 技術在無人機上的應用體現,直接貼合當前無人機行業應用。課程平臺是人工智能無人機教學版,該無人機搭載 Nvidia的嵌入式處理器,運行 ROS機器人操作系統,是學習ROS,SLAM,深度學習框架的絕佳選擇。課程 20 學時。
(四)無人機仿真平臺實驗(選修)
無人機仿真平臺實驗是高級的仿真系統實驗課程,可在仿真平臺上模擬飛行,熟悉地面站操作,更可在試飛之前,驗證代碼邏輯,減小炸機損失。進一步可學習關于多機協同,集群的概念與算法。課程依托半物理仿真平臺,這是一個基于虛幻4 游戲引擎的仿真平臺,可以模擬生成多種傳感器,是飛行視覺仿真的絕佳平臺。課程 20 學時。
實驗類型:
機器人系統綜合實踐
實驗室名稱/支撐課程:
工業機器人主題/工業機器人視覺綜合實驗

課程名稱/簡介:
本課程面向機器人工程專業高年級學生開展綜合設計,使用 HBO3-545-C10六軸工業機器人(3KG),基于C++編程基礎,搭建機器人視覺系統,調用OpenCV進行視覺二次開發,最終控制機器人完成視覺閉環的機器人作業。
一、C++和 Qt 基礎
二、視覺硬件基礎
三、機器視覺基礎
四、圖形化視覺平臺二次開發
五、進階項目實訓 1——金屬加工零件在線視覺檢測
六、進階項目實訓 2——視覺點膠機
七、進階項目實訓3——機器人視覺定位
產品名稱:
桌面型人工智能6軸機械臂

產品概述:
- Mirobot機械臂是自主 研發設計的一款安全易用的迷你六軸桌面工業 機器人,是一款開放式AI機器人綜合教學平臺。
- Mirobot具有寫字畫畫、激光雕刻、搬運 碼垛、垃圾分類等多種功能,預留多個擴展接 口支持二次開發,同時支持Python、C、C++、 Java等編程語言。
- PC端軟件、手機APP、藍牙示教器多種控 制方式,自由設定動作、任意添加夾具,滿足 不同年齡段學習需求。同時配備完整的v-rep仿 真源碼、Matlab仿真源碼、以及基于ROS平臺 的Mirobot開發源碼。


教學資源:
《機器人學——規劃、控制與應用》
主要內容:包括機器人學的概況、坐標變換、運動學、靜力學、動力學、機器人控制和運動規劃,最后結合所學的機器 人學相關知識綜合討論了典型的桌面6軸機械臂的控制和應 用等問題。
能力培養:幫助學生掌握機器人運動學、動力學、運動規劃 等機器人學的算法理論知識,夯實機器人控制理論基礎,強 化學生的數學應用能力,提高學生的綜合創新設計能力。
《機器人學實驗指導書》
主要內容:包括六軸機器人研制過程中的機器人學原理問題, 緊密結合機器人學教材,設計了涵蓋機器人數學基礎、機器 人正運動學分析、機器人逆運動學計算與控制、機器人動力 學及控制等實驗項目。
能力培養:培養學生solidworks三維建模設計能力,V-rep 機器人仿真能力,Matlab編程仿真能力,理論聯系實踐, 通過具體的實驗項目幫助學生進一步理解機器人理論知識, 提高學生的編程能力。
《ROS機器人開發技術——以Mirobot為實例》
主要內容:包括ROS入門的基礎知識,ROS的軟件框架和基本功能,結合Mirobot機械臂ROS的開發過程,介紹機械 臂運動控制、機器語音、機器視覺等功能案例,并配有大量 的ROS圖表、代碼等。
能力培養:幫助學生掌握ROS基礎功能使用,同時深入理 解基于ROS的機器人開發過程,擴展學生的機器人開發技 能,提高學生的編程應用能力。
產品名稱:
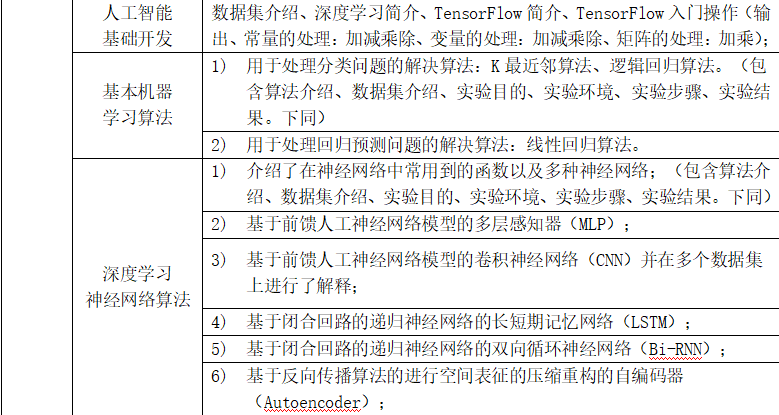
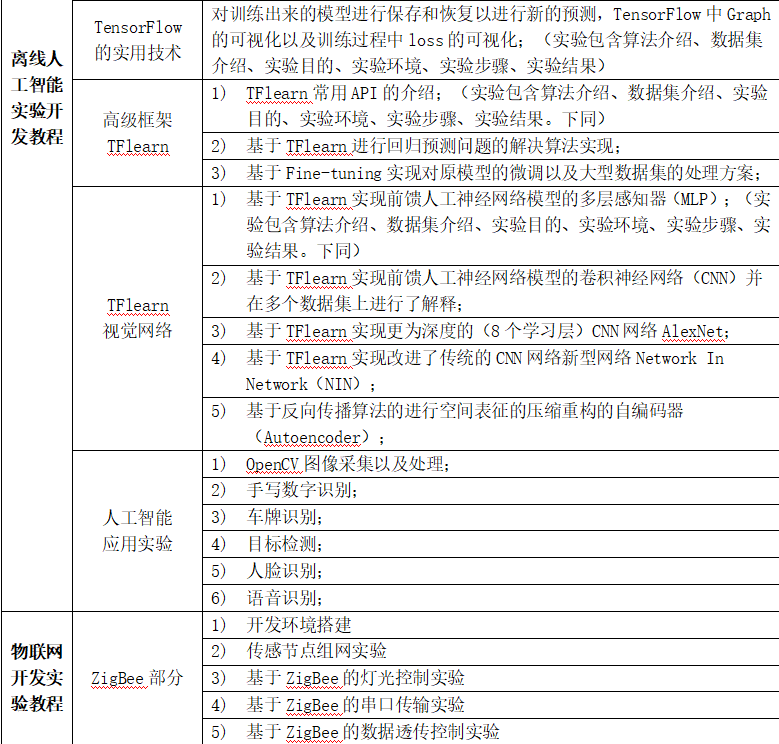
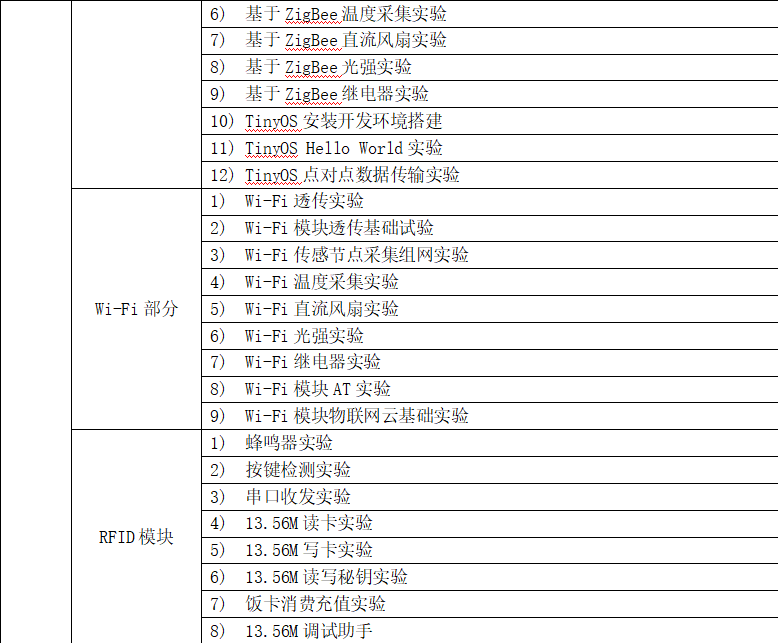
人工智能教學實驗平臺

產品特點
- 采用了人工智能計算機視覺與語音技術+嵌入式Linux技術+物聯網技術+機械臂控制技術+AR技術的融合;
- 同時滿足了“人工智能+嵌入式”、“人工智能+物聯網” 、“人工智能+機器人”的基礎教學需求;
- 設計了多個創新教學項目:AI計算機視覺倉庫貨物分揀、整理;AI語音機械臂控制、貨物分揀;AR倉庫貨物分揀等;
- 百度AI開放平臺調用,實現在線圖像識別;
- 視覺攝像頭結合機械臂,采用了移動偵測目標方式(非固定攝像頭方式);
- 采用了高性能的人工智能計算單元;
- 設置了全鍵盤,可實現直接在實驗箱上的Ubuntu系統中進行應用程序開發;
- 配套設計了系統的“嵌入式人工智能”課程體系;
- 配套系統的Python、TensorFlow、PaddlePaddle及人工智能機器學習相關理論及應用實驗;
- 配套系統的STM32開發、機械臂開發以及物聯網技術開發的相關理論及應用實驗;
- 產品榮獲山東省物聯網協會科技進步二等獎。
- 物聯網與邊緣計算的項目。